
The Excavating Arm
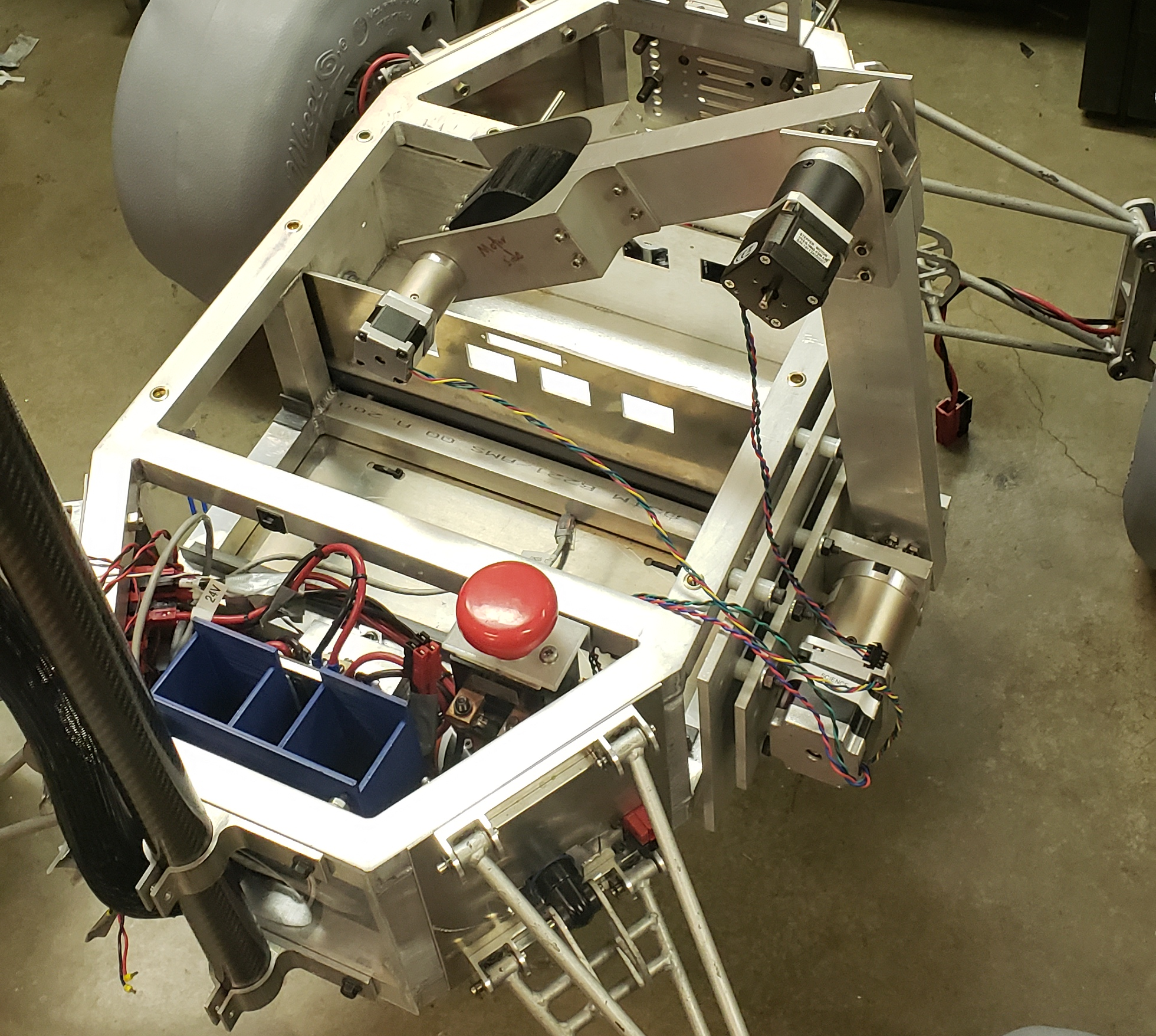
My final year at CSUF revolved largely around this auspicious piece of equipment. From initial idea formation to design to manufacturing to some physical testing, I was able to build a functional chassis-mounted three degrees of freedom robotic arm.
This project largely involved first-order modelling, heavy CAD drafting, time in the machine shop, hardware and actuator selection, participation in design reviews, and several write-ups.
Link to the final SolidWorks drawings, models, and assemblies